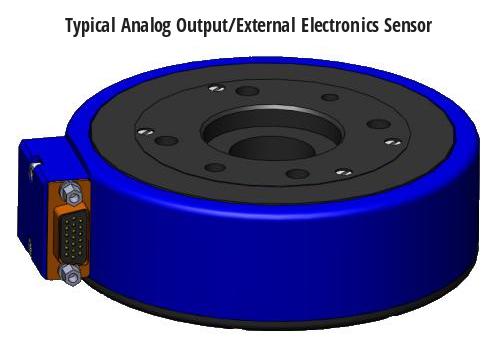
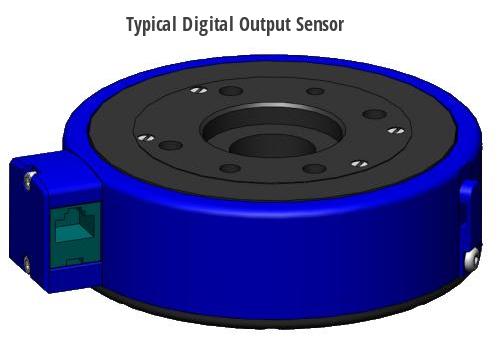
The JR3 multi-axis load cell, also commonly known as a 6 degree-of-freedom force-torque sensor, is a cylindrically shaped monolithic aluminum device (optionally stainless steel or titanium) containing analog and digital electronics systems. Foil strain gauges bonded to multiple internal load-bearing elements sense the loads imposed on the sensor. The strain gauge signals are amplified and combined to produce analog representations of the forces along three orthogonal axes (x,y and z) as well as the moments or torques about those axes. In most models, the analog data is converted to digital form by electronic systems contained within the sensor. Some models optionally provide analog output instead of digital.
JR3 sensors are produced in a wide variety of load ratings and bolt patterns. The physical size of the sensor varies depending on factors such as force and torque ratings and required mounting dimensions. A drawing of your specific sensor including overall dimensions and mounting details, and a detailed specification sheet are provided with your sensor.
The axes on standard JR3 sensors are oriented with the x and y axes at the horizontal midplane of the sensor body and the z axis along the sensor's central axis. The reference point for all loading data is the geometric center of the sensor. When viewed from the robot side of the sensor the forces and moments follow the standard right hand rule.
E-Series
- 30E
- 45E
- 75E
M-Series
- 67M
- 100M
- 160